Pic
16F et Picaxe
![]()
objectif :
Aprés avoir réalisé des programmes à base
de PIC16F ou 12F j'ai découvert les PICAXE nettement plus facile
à mettre en oeuvre pour un débutant en programmation j'ai donc
souhaité construire cette page
j'ai programmé avec programming edition v5 ependant une nouvelle
version du logiciel de programmation de PE6 beta est disponible ici
cette nouvelle version apportent de nouvelles fonctions et améliore les performances (plus de memoire sur certains picaxe ... )
la version PE5 ne sera bientôt plus mise ajour (aprés 2015)
le passage en français se fait en suivant le chemin fichier option langue
une traduction du tuto TUTO (merci Laurent )
Ce tuto est issus du document PE6 Beta Testing Briefing – Sep 2013
Principde de programmation:
J'ai reactualisé ce document de programmation qui
explique la programmation d'un pic16f88 et la compare avec un picaxe.
Les principes de programmation structurée décrits restent les
mêmes pout tout autre µP.
Fichier excel d'aide à la configuration d'un pic 16F84 ,16F628 ,12F629
ou 675 fichier
de configuration pic
Préambule :
les picaxe et les pic etant issus du même fabricant il y a donc des
similitudes qui m'ont fait choisir des composants interchangeables
en respectant certaines règles.
On pourra ainsi sur un circuit respectant certaines règles remplacer un
pic par un picaxe ou inversement
j'utilise
en particulier des 08m2 (picaxe) ou des 12F683 (8 broches )
des 20m2 (picaxe ) ou 16F690 (20 broches )
( éventuellement j'utilise d'autres pic ayant les mêmes brochages avec
un peu moins de potentiel mais dans un premier temps restons avec
les pic cités ci dessus .)
Ces composants ont des points communs et de differences dans la connectique .
Interessons
nous au 20m2 et au 16f690 que nous allons rendre interchangeable
Les 2 pattes du haut (1 et 20 ) sont reservées à l'alimentation en 5V .
Un condensateur de 100nF est necessaire aux bornes des ces pattes
les pattes 2 et 19 ne seront pas utilisés pour la programmation
une résistance de 10K reliera la patte 2 à la masse (patte 20)
la patte 4 sera toujours une entrée
En respectant ces règles on pourra réaliser des programmes avec pic ou des picaxe sur la même platine d'essai
je
ne detaillerai pas ici la prise en main des picaxe un site l'a déja
trés bien fait
http://electromag1.wifeo.com/
Exemples de
programmation
les programmes proposés vont
permettre de commander un petit circuit de train miniature
à partir de bouton poussoir ou
d'interrupteur ceux ci commanderont les aiguillages , les canton ..
tout cela via un emeteur infrarouge
cela limitera fortement la longueur
des fils et permettra d'automatiser trés simplement le circuit
on pourra facilement demander un itinéraire réaliser un automatisme ...
Ne vous sauvez pas c'est beaucoup plus facile
que vous ne le pensez!
Etape 1
Nous allons concevoit un programe qui
attend un signal infarouge et
allume une LED (su 2 ) en fontion du code reçu.
A terme cela permettra d'afficher l'itinéraire du train
dans un premier temps c'est une télécommande Sony de télévision qui
nous servira d'émetteur
Allons y pour le récepteur !!
Nous avons besoin des composants suivant
un picaxe 20m2
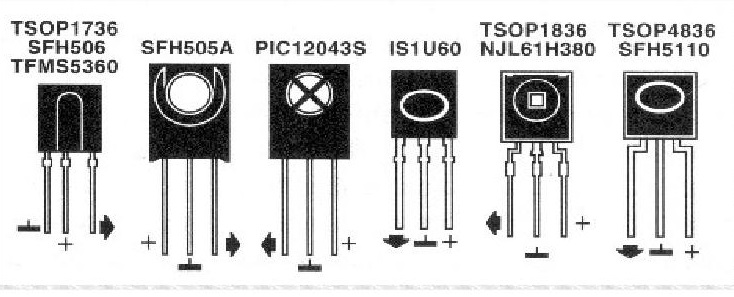
un TSOP connecté au
picaxe (ou au pic ) (TSOP 4840, ou 4838 ou equivalent
des resistances de 100 ohms , 10 (2fois) 10K
1 condensant de 100nF
1 condensateur de 4,7µF
Une platine à trou ou veroboard ou CI ... et quelques fis
les TSOP 21XX sont cablés comme les tsop 17XX
voici les programmes !
recepteur infrarouge
#picaxe 20M2
dirsb=%11111111
dirsc=%001111111
symbol sortiea = pinb.0
symbol code = b4
debut:
code=0
irin [100,debut],c.7,code
if code=1 then
sortiea=0
endif
if code=2 then
sortiea=1
endif
goto debut
end
pour plus d'explication du programme
et des info sur le schémas , cablage ...
ce lien vous dirige sur un pdf explicatif détaillé
faites donc le programme pour gérer 14 sorties
apés avoit fait l'effort de chercher bien sur !!
vérifier la solution sur ce lien